Industry Briefing
A single destination for timely, editor-curated robotics news from around the world.
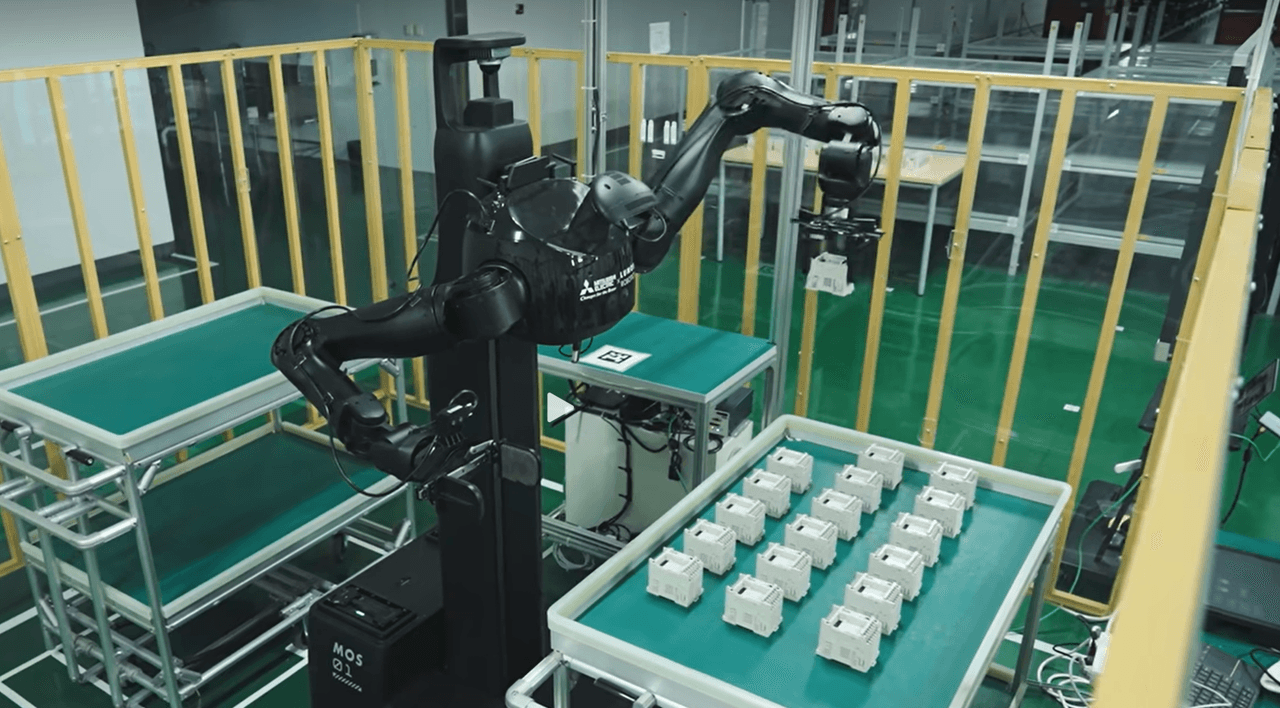
Visual Language Models Train Robots to Read Human Emotions
A recent study led by Seung Chan Hong at the University of Melbourne explores the emotional capabilities of collaborative robots as they increasingly work alongside humans. Published on May 18 in IEEE Robotics and Automation Letters, the research investigates how robots can better understand human emotions through contextual cues, beyond just facial expressions. Involving 40 volunteers, the study trained a vision language model (VLM) to interpret emotions based on video interactions where robots handed objects to humans. The VLM outperformed traditional AI systems, scoring 0.86 in emotional accuracy compared to 0.77 for conventional methods. This improvement is attributed to the VLM's ability to consider the entire context of interactions rather than isolated facial expressions. In a follow-up experiment, participants interacted with a robot that was programmed to make an error, receiving either an emotionally adaptive apology or a standard one. The majority preferred the adaptive response, but trust in the robot diminished after it failed to complete its task, highlighting that emotional responses cannot compensate for a lack of functionality. While the VLM effectively recognized emotions from a third-party perspective, its accuracy dropped when compared to participants' self-reported feelings, indicating that robots still struggle to fully understand human emotions. The findings suggest that while emotional adaptivity is valuable, the primary concern for users remains the robot's competence in performing tasks.
Robotics Journal-watch Ai-models Emotion-recognition
Deepfake Detection Dataset Aims to Keep Up With Generative AI
A collaborative effort involving researchers from Microsoft, Northwestern University, and the non-profit organization Witness has led to the development of a new dataset aimed at enhancing the detection of AI-generated media. Announced in a study published on April 10 in IEEE Intelligent Systems, the Microsoft-Northwestern-Witness (MNW) deepfake detection benchmark is designed to address the growing challenge of distinguishing real from fake content in an era where generative AI technology is rapidly advancing. The dataset includes a diverse array of AI-generated images, audio, and videos, reflecting the current landscape of generative AI. Thomas Roca, a principal research scientist at Microsoft, emphasized the increasing sophistication of AI-generated media, which can easily be produced by anyone using accessible applications. This proliferation raises significant concerns, including identity fraud and the creation of harmful content. The MNW benchmark aims to improve the effectiveness of detection systems by providing a wider variety of AI-generated materials, including those that have undergone post-processing manipulations. Researchers acknowledge that while this dataset could potentially be misused to develop new evasion techniques, it is crucial for enhancing the ability to assess the authenticity of media as generative AI continues to evolve. The team plans to update the dataset biannually to incorporate the latest developments in generative AI and detection challenges, with the goal of fostering transparency and raising standards in the fight against deepfake content.
Deepfakes Generative-ai Artificial-intelligence Microsoft Journal-watch
Perseverance Smashes Autonomous Driving Record on Mars
NASA's Perseverance rover has achieved a remarkable milestone in autonomous navigation on Mars, completing approximately 90% of its travels without human intervention since landing on February 18, 2021. As of October 28, 2024, the rover has driven over 30 kilometers (18.65 miles) and collected 24 samples, significantly surpassing the 6.2% autonomy rate of its predecessor, Curiosity. This advancement is largely attributed to its Enhanced Autonomous Navigation (ENav) algorithm, which allows the rover to analyze its surroundings and evaluate thousands of potential paths using limited computing power equivalent to an outdated iMac G3. The rover's journey has been guided primarily by images it captures, as high-resolution data from Mars Reconnaissance Orbiter is often insufficient for navigation. Despite challenges posed by the uncharted Martian terrain, ENav enables Perseverance to assess travel time and terrain roughness, running complex calculations only on the most promising paths. This strategic design has resulted in unprecedented levels of autonomous driving, including a record-setting 331.74 meters in a single Martian day on April 3, 2023. Masahiro "Hiro" Ono, a supervisor at NASA’s Jet Propulsion Laboratory, emphasizes the importance of advancing autonomous navigation for future space exploration, particularly as missions venture farther from Earth where communication delays become significant. The ongoing success of Perseverance highlights the critical role of automation in expanding the frontiers of space exploration.
Mars Perseverance-rover Autonomous-robots Journal-watch