Industry Briefing
A single destination for timely, editor-curated robotics news from around the world.

Novacavi Supports the Polaris Project Developed by ETH Zurich
Novacavi is collaborating with ETH Zurich on the POLARIS project, which aims to develop an advanced autonomous underwater vehicle for climate monitoring and security research. Announced on January 7, 2026, the project focuses on non-invasive measurement of ice thickness beneath lake surfaces, allowing for the collection of high-resolution data without disturbing the ice. This innovative approach minimizes risks for personnel in extreme conditions. Novacavi's contribution includes the creation of a neutrally buoyant cable that enhances the vehicle's reliability, maneuverability, and overall mission safety. Francesca Faverio, Novacavi's Business Development Manager, expressed pride in supporting this initiative, highlighting its importance for environmental understanding and safety in challenging operational contexts. The project is based in Zurich, Switzerland.
novacavi polaris project eth zurich
ETH Zurich's Proprioceptive Transformer Enhances Robotic Dexterity Without Visual Cues
Researchers at ETH Zurich have unveiled a groundbreaking Proprioceptive Transformer (PT) system that significantly enhances the capabilities of tendon-driven robotic hands. This innovative technology allows the robotic hand to execute complex manipulation tasks using only proprioceptive feedback, achieving performance levels that are three times superior to conventional methods that depend on visual input. The development addresses longstanding challenges in robotic dexterity by removing the need for external sensors, thereby enabling more efficient and precise control of robotic movements. This advancement could pave the way for more sophisticated applications in robotics, enhancing the functionality and versatility of robotic systems in various fields.
Robotic Manipulation Proprioception Soft Robotics AI Machine Learning
ETH Zurich's Breakthrough: Highly Biomimetic Pneumatic Muscle Robotic Hand Replicating Human Anatomy
Researchers from ETH Zurich have unveiled a groundbreaking robotic hand that mimics human anatomy, utilizing advanced 3D printing techniques and 22 independently controlled pneumatic artificial muscles. This innovative development, which was announced recently, aims to significantly improve dexterity and adaptability in robotic applications. The design is rooted in detailed human anatomical data, allowing the robotic hand to perform a wide range of tasks with precision. The project is poised to advance the fields of prosthetics and enhance collaboration between humans and robots, addressing the growing need for more versatile and functional robotic systems in various sectors.
Soft Robotics Pneumatic Actuators 3D Printing Prosthetics Biomimicry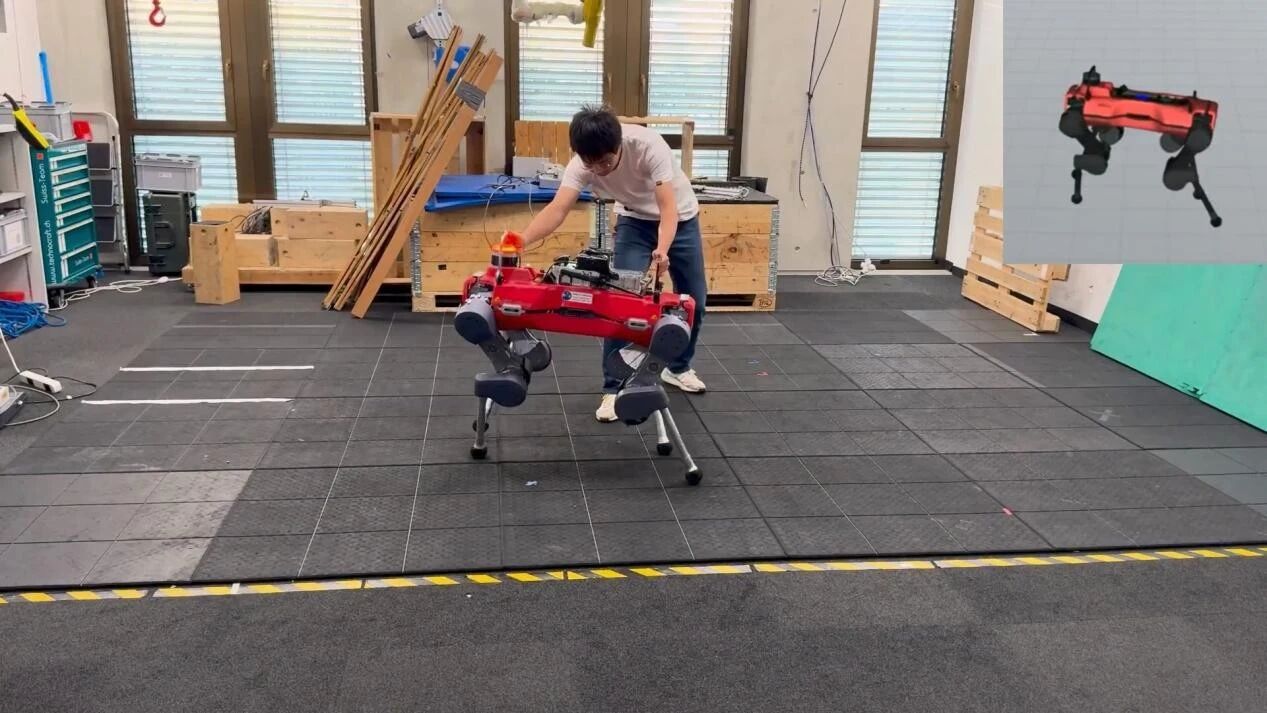
ETH Zurich Enables Robots to 'Imagine': Zero-Shot Deployment for Quadrupedal and Humanoid Robots!
A research team at ETH Zurich has unveiled a groundbreaking neural network simulator designed to enhance robotic capabilities by enabling robots to visualize actions internally before executing them on physical hardware. This innovative framework, known as the Robotic World Model (RWM), facilitates zero-shot transfer for ANYmal D and Unitree G1 robots, significantly improving their ability to predict motion trajectories with remarkable accuracy. The development, which was completed recently, represents a significant advancement in robotics, potentially transforming how robots interact with their environments by allowing for more efficient and precise movements.
Robotic Simulation Neural Networks Quadrupedal Robots Humanoid Robots AI Training
NVIDIA Launches Open Humanoid Robot Reference Platform for Academic Research
NVIDIA has introduced the Isaac GR00T humanoid robot reference design, a sophisticated platform aimed at enhancing research in humanoid robotics. This innovative design combines cutting-edge hardware and software, facilitating a more efficient development process for academic institutions such as Stanford University and ETH Zurich. By concentrating on physical AI, the Isaac GR00T provides a holistic solution for data collection, simulation, and deployment, thereby supporting the advancement of robotics research. The unveiling of this platform marks a significant step in the evolution of humanoid robotics, offering researchers the tools necessary to push the boundaries of technology in this field.
Humanoid Robots AI Robotics Research Robot Development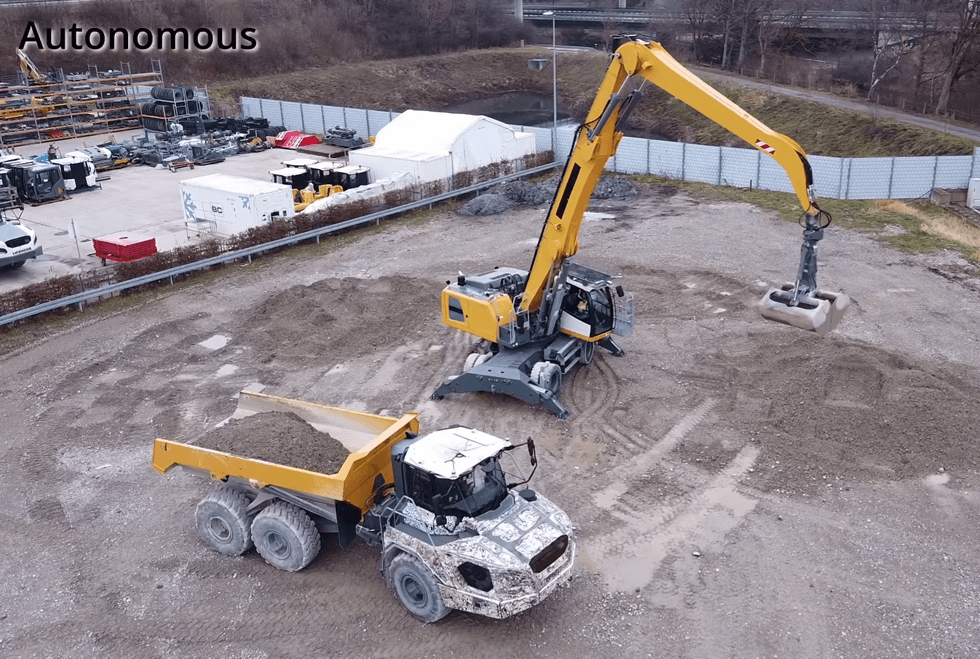
Video Friday: Heavy Robotic Machinery Operates Itself
IEEE Spectrum robotics has released its latest edition of "Video Friday," showcasing a variety of innovative robotics videos and announcing upcoming robotics events. Notable conferences include ICRA 2026 in Vienna from June 1-5, and the Summer School on Multi-Robot Systems in Prague from July 29 to August 4, 2026. Among the featured content is a groundbreaking autonomous material-handling solution developed by ETH Zurich, capable of operating a 40-ton material handler, traditionally a labor-intensive task. Other highlights include the introduction of the world's first production-ready manned mecha by Unitree, and the launch of NIX, an embodied AI exploring dance and movement, which will be made available for free to select partners. NTNU has unveiled the Unified Autonomy Stack, a robust system designed for aerial and ground robots, enhancing their autonomy through advanced perception and navigation capabilities. This system has been validated in challenging environments, showcasing its effectiveness in exploration and object discovery. Robotics expert Rodney Brooks, cofounder of Robust AI, shared insights on the challenges of innovation in robotics and the implications of the current AI surge during a Q&A session ahead of his panel at the Forbes America Innovates event in San Francisco. As the field continues to evolve, the integration of data collection methods remains a significant challenge, with the Koala platform exemplifying innovative approaches to enhance robotic manipulation tasks.
Home-robots Humanoid-robots Video-friday Material-handling-technology Robot-videos Robot-grippers
Researchers Say Autonomous Robots Can Make Safer Decisions With ‘Rulebooks’ System
Researchers at Iowa State University, in collaboration with ETH Zürich, have introduced a novel framework designed to enhance the decision-making capabilities of autonomous robots in situations where rules may conflict. The findings, published in the IEEE Transactions on Robotics, outline a system referred to as "rulebooks," which prioritizes rules rather than merging them. This innovative approach aims to improve the safety and transparency of robotic operations in real-world environments, addressing a critical challenge in the field of robotics. The study underscores the importance of establishing clear guidelines for robots to navigate complex scenarios effectively, ultimately contributing to the advancement of autonomous technology.
AI AI Research & Advances Robotics autonomous systems autonomous vehicles ETH Zürich
Video Friday: A Robot Hand With Artificial Muscles and Tendons
IEEE Spectrum robotics has released its weekly roundup of notable robotics videos and a calendar of upcoming events, including the International Conference on Robotics and Automation (ICRA) scheduled for June 1-5, 2026, in Vienna. This week's highlights feature advancements in biomimetic design, showcasing a printed hand that integrates soft and rigid components with artificial muscles, enhancing our understanding of natural kinematic structures. Boston Dynamics product managers reflect on classic robots, including LittleDog, which contributed to legged locomotion research over a decade ago. Additionally, DRAGON Lab has introduced a new trajectory planning method for floating-based articulated robots, facilitating exploration in complex environments. Their OmniPlanner tool has been tested extensively across various terrains, including underground mines and forests. The FZI Research Center, in collaboration with ETH Zurich and other institutions, has made strides in preparing for lunar missions by testing cooperative autonomous multirobot teams outdoors. Meanwhile, advancements in humanoid robotics are being discussed, with Kamel Saidi from NIST emphasizing the importance of performance standards for broader adoption. In academia, Junyao Shi from UPenn's GRASP lab will address the challenges of building general-purpose robots, focusing on how human data and foundation models can bridge existing gaps in robotics. This ongoing exploration of robotics technology underscores the field's rapid evolution and its potential impact on various sectors.
Humanoid-robots Video-friday Underwater-robots Bipedal-robots Robot-videos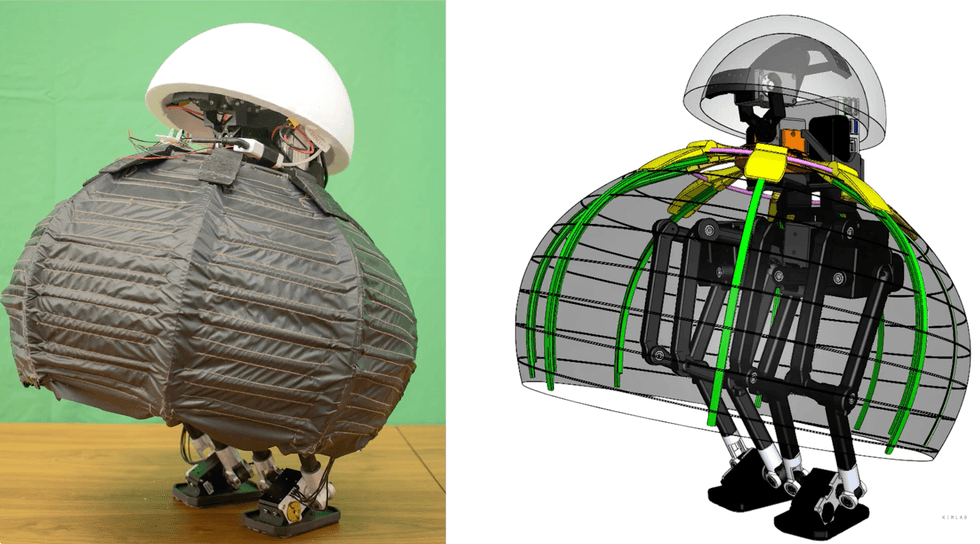
Video Friday: Bipedal Robot Stops Itself From Falling
IEEE Spectrum robotics has released its latest edition of Video Friday, showcasing a variety of innovative robotics videos and announcing upcoming events in the field. Among the highlights is the Robotic Autonomy in Complex Environments with Resiliency (RACER) program, which is nearing completion after extensive collaboration with the U.S. Army and Marine Corps. This program is expected to leave a lasting impact on military operations and stimulate private-sector investment in autonomous technologies. Notable advancements include the introduction of COSA, a cognitive operating system that enhances humanoid robots' capabilities for high-level cognition and motion control. Meanwhile, the 1X World Model has made significant strides in robot learning, allowing its NEO model to perform tasks autonomously based on voice or text prompts, even for unfamiliar objects. In assistive technology, the GuideData Dataset has been launched to improve interactions between guide dog trainers and visually impaired individuals, aiming to enhance mobility and safety. Additionally, Fourier's Care-Bot prototype is gaining attention for its interactive features at CES 2026. In environmental monitoring, ETH Zurich has developed an autonomous quadruped robot for volcanic gas measurements, successfully tested on Mount Etna. Humanoid robots have also made progress in industrial logistics, completing proof-of-concept testing at Siemens's factory in Erlangen. Columbia Engineers have created a robot capable of learning facial lip motions for speech and singing through observational learning, marking a significant milestone in robotics. Lastly, DEEP Robotics showcased its quadruped robots' capabilities in complex firefighting scenarios, while Synapticon introduced its POSITRON platform to enhance safety in humanoid robots for real-world applications.
Robotics Video-friday Bipedal-robots Humanoid-robots Quadruped-robots Industrial-robots
Robot Talk Episode 138 – Robots in the environment, with Stefano Mintchev
Claire recently engaged in a discussion with Stefano Mintchev, an Assistant Professor of Environmental Robotics at ETH Zürich, Switzerland. The conversation centered on the innovative use of robots designed to explore and monitor natural environments. Mintchev, who holds a Ph.D. in Bioinspired Robotics from Scuola Superiore Sant’Anna in Italy and has conducted postdoctoral research at EPFL in Switzerland, shared insights into how these advanced robotic systems can enhance our understanding of ecological systems. The dialogue highlighted the importance of integrating technology with environmental science to address pressing ecological challenges.

A Brain in the Alps: Flexion Raises $50M to Build the ''Android'' of Humanoids
Flexion Robotics, a Swiss startup, has officially launched after securing $50 million in Series A funding. The company boasts a distinguished team comprised of experts from ETH Zurich and NVIDIA, highlighting its strong technological foundation. In a promotional video, a Unitree G1 robot is showcased efficiently cleaning the picturesque Swiss Alps, emphasizing the startup's commitment to innovative robotics solutions. The funding will likely support the development and deployment of advanced robotic technologies aimed at enhancing environmental sustainability and operational efficiency in various sectors.
G1 Flexion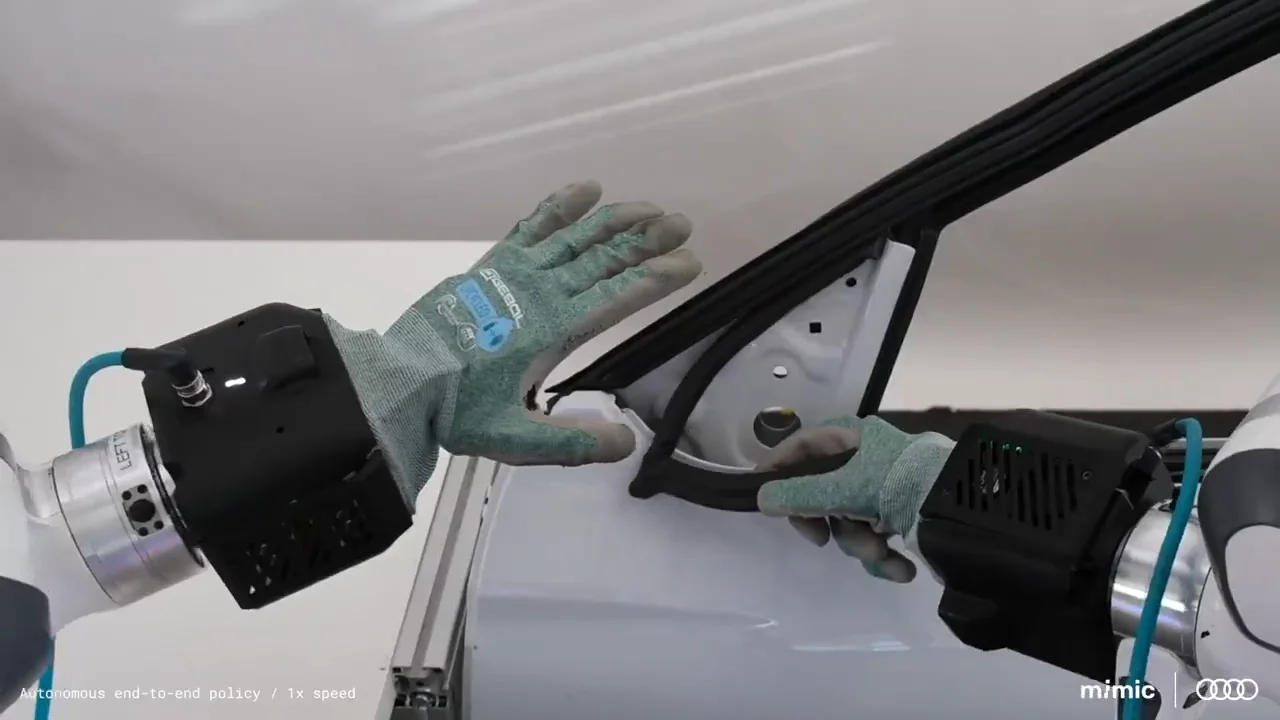
Audi Partners with Mimic Robotics for AI-Driven Automotive Assembly
Audi has announced a partnership with Zurich-based startup Mimic Robotics to enhance its manufacturing processes by incorporating learning-based, end-to-end robotic systems. This collaboration signifies a significant transition from traditional rigid programming methods to a more adaptable approach known as "Physical AI." By leveraging advanced robotics, Audi aims to improve efficiency and flexibility in its production lines, responding to the evolving demands of the automotive industry. The integration of these innovative technologies is expected to streamline operations and foster a more responsive manufacturing environment.
Mimic Robotics Europe Audi ETH Zurich
Mimic Robotics Raises $16M to Pair Dexterous AI Hands With Standard Robot Arms
A Zurich-based ETH spin-off is advocating for a practical and swiftly implementable solution to industrial automation, challenging the notion that full-body humanoid robots are the optimal choice for most tasks. Instead, the company emphasizes the development of a robust AI foundation model, which is designed to be trained and operated by human workers. This approach aims to enhance efficiency and effectiveness in various industrial applications, reflecting a shift towards more adaptable and user-friendly technologies in the sector.
Mimic Robotics hand handsRobotics needs a service framework.
RSF defines a common language for robot service capability, lifecycle operations, certification pathways, and service-provider networks.